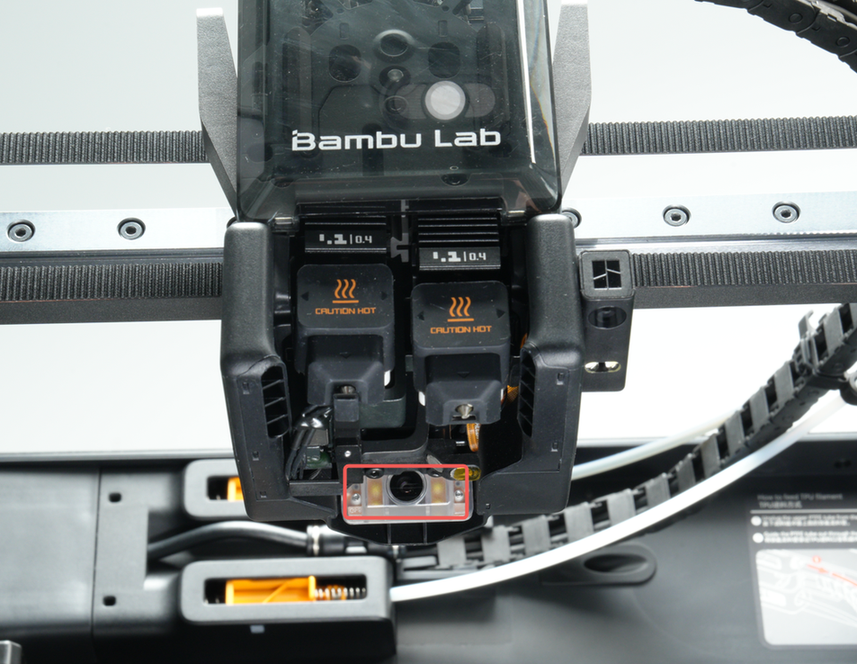
¶ Inteligentne wykrywanie kamery dyszy
Drukarka H2D jest wyposażona w kamerę dyszy do wykrywania nieprawidłowych warunków drukowania, w tym zlepiania się dyszy, drukowania w powietrzu i spaghetti.
¶ Wykrywane zjawiska
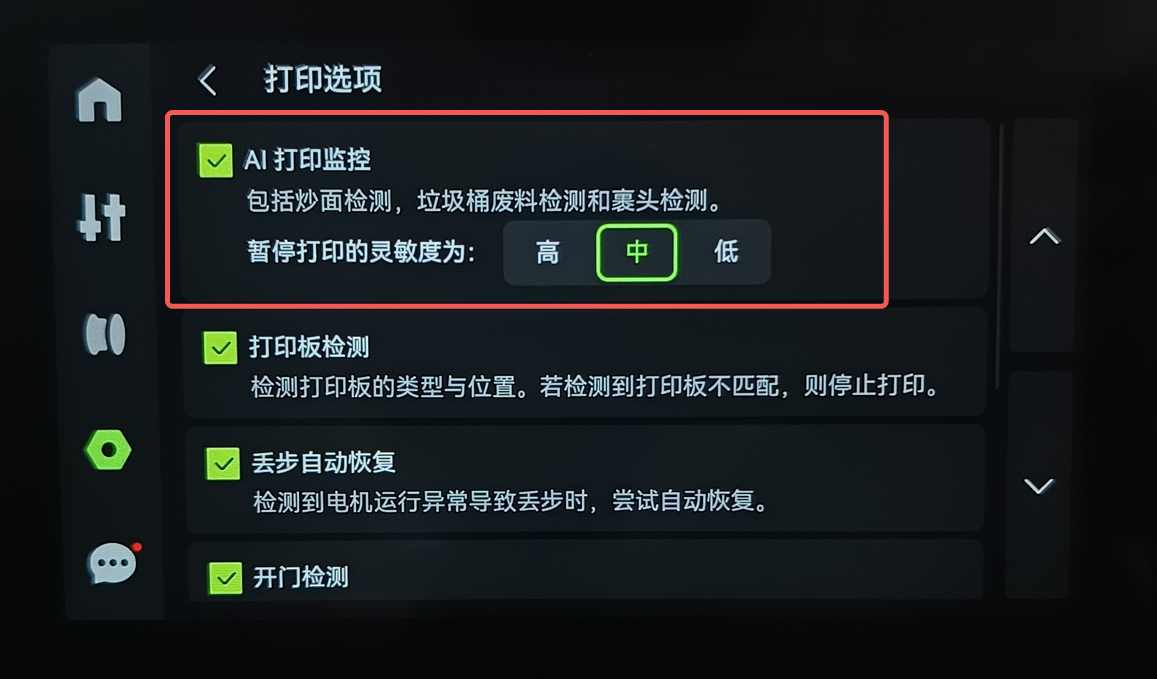
Jeśli funkcja monitorowania drukowania AI jest włączona, wykrywanie AI kamery dyszy rozpocznie się automatycznie po zakończeniu fazy przygotowania do drukowania. Obecnie kamera dyszy może wykrywać trzy rodzaje defektów: zlepianie się dyszy, drukowanie w powietrzu i spaghetti.
¶ Opis wykrywanych zjawisk
¶ Spaghetti na dyszy
Spaghetti z perspektywy kamery dyszy: Można zobaczyć nitkowate włókna przyklejające się do dyszy lub spaghetti występujące pod dyszą.
 |
 |
¶ Zlepianie się na dyszy
Zlepianie się dyszy z perspektywy kamery dyszy: Filamenty tworzą grudkę o określonej wielkości, która całkowicie otacza dyszę.
 |
 |
¶ Drukowanie powietrzem na dyszy
Drukowanie powietrzem z perspektywy kamery dyszy: Dysza znajduje się w pewnej odległości od modelu i nie wytłacza już filamentu. Alternatywnie może wystąpić wyciek filamentu przy dyszy, jak pokazano na obrazku po prawej stronie.
Uwaga: Jeśli używasz AMS 2 Pro, kamera dyszy może współpracować z AMS 2 Pro w celu wykrywania drukowania powietrzem, zapewniając większą niezawodność.
 |
 |
¶ Alarm błędu
¶ Powiązane kody błędów
| Kod błędu | Wyjaśnienie |
|---|---|
| 03008003 | Monitorowanie drukowania AI wykryło wady spaghetti. Przed kontynuowaniem drukowania sprawdź jakość wydrukowanego modelu. |
| 0C00803F | AI wykryło zlepianie się dyszy. Sprawdź stan dyszy. Zapoznaj się z asystentem w celu uzyskania rozwiązań. |
| 0C008040 | AI wykryło wadę drukowania powietrzem. Sprawdź stan wytłaczania hotendu. Zapoznaj się z asystentem w celu uzyskania rozwiązań. |
¶ Powiązane błędy HMS
0C00_0300_0003_0008: Może wystąpić potencjalna wada spaghetti. Sprawdź jakość wydruku i zdecyduj, czy przerwać zadanie.
0C00_0300_0002_000E: Wygląda na to, że dysza jest pokryta zaciętym lub zatkanym materiałem.
0C00_0300_0003_0010: Wygląda na to, że drukarka drukuje bez wytłaczania.
¶ Scenariusze awarii
W niektórych przypadkach inteligentna funkcja wykrywania kamery dyszy może zawieść:
- Kamera dyszy nie jest zainstalowana lub nie działa prawidłowo.
- Kamera dyszy jest mocno zabrudzona lub światło kamery dyszy jest nieprawidłowe, co uniemożliwia uzyskanie wyraźnych obrazów dyszy.
 |
 |
- Podczas drukowania filamentów wysokotemperaturowych, jeśli temperatura w pobliżu kamery dyszy okaże się zbyt wysoka (powyżej 85°C), automatycznie zostanie aktywowane zabezpieczenie przed przegrzaniem, co doprowadzi do tymczasowego zawieszenia wykrywania przepływu.
- Funkcja wykrywania AI nie jest włączona podczas cięcia za pomocą oprogramowania innych firm lub korzystania z kodu G z innego modelu.
¶ Inteligentne wykrywanie kamery na żywo
Wyposażyliśmy drukarkę H2D w kamerę na żywo w rogu komory. Ta kamera umożliwia różne inteligentne funkcje wykrywania, takie jak wykrywanie spaghetti, wykrywanie obcych obiektów, wykrywanie płyty roboczej i identyfikacja typu hotendu.

¶ Wykrywanie spaghetti
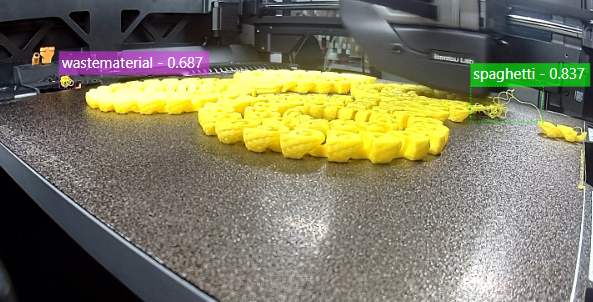
Podobnie jak w przypadku wykrywania spaghetti w serii X1, po awarii drukowania, terminowe wykrywanie spaghetti pomaga zapobiegać dalszym stratom, takim jak marnotrawstwo filamentów i uszkodzenie drukarki.
Należy pamiętać, że Spaghetti Detection nie jest niezawodną metodą unikania błędów drukowania. Mogą wystąpić pewne fałszywe pozytywne wykrycia lub przypadki, w których funkcja Spaghetti Detection może nie działać zgodnie z oczekiwaniami, szczególnie w przypadku używania czarnego/ciemnego filamentu.
Aby zapewnić największe szanse powodzenia, zaleca się zawsze umycie płyty ciepłą wodą i detergentem, aby uniknąć problemów z przyczepnością i upewnić się, że ustawienia slicera są prawidłowe.
 |
 |
¶ Etapy robocze wykrywania Spaghetti
Metoda robocza jest zgodna z wykrywaniem spaghetti w serii X1:
- Zrób klatkę z kamery na żywo co T sekund.
- Wyślij obraz do detektora AI działającego na NPU (bez chmury) wewnątrz urządzenia
- Przetwórz wyniki wykrywania. Gromadzimy wyniki dla ostatnich 10 klatek. Jeśli jest wystarczająco dużo pozytywnych kandydatów i są oni przestrzennie spójni, wykrywana jest awaria spaghetti.
¶ Wymagania wstępne wykrywania Spaghetti
Aby detektor działał prawidłowo, istnieje kilka wymagań.
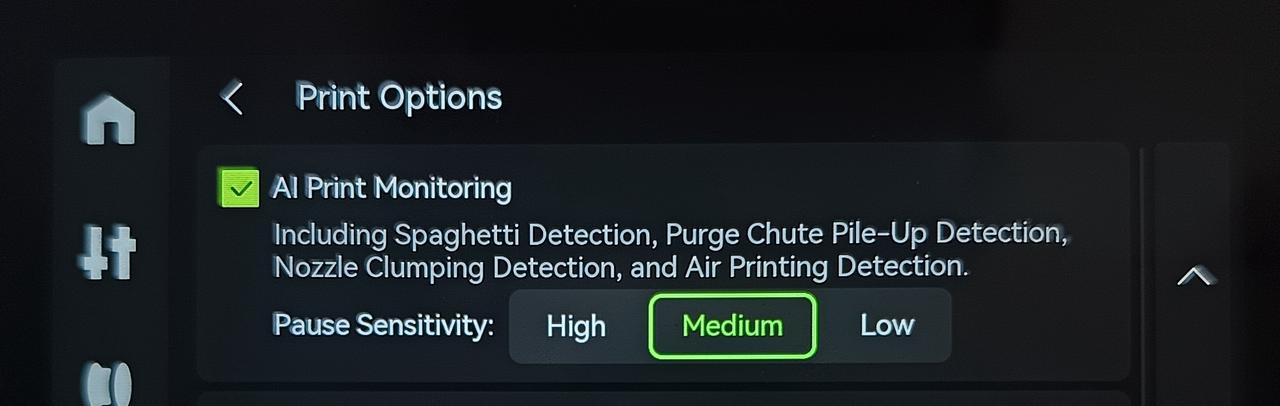
- Funkcja wykrywania musi być włączona w opcjach drukowania. Możesz dostosować czułość od {niskiej, średniej, wysokiej}. Jeśli nie korzystasz z drukarki przez stosunkowo długi czas (np. całą noc), możesz ustawić czułość na niską, dzięki czemu rzadziej będziesz musiał wstrzymywać drukowanie z powodu małych defektów.
- Światło komory musi być włączone. Wykrywanie spaghetti wymaga dobrych warunków oświetleniowych, aby uchwycić szczegóły wydruków. Domyślnie włączamy światło, gdy zaczyna się drukować pierwsza warstwa. Jeśli światło zostanie wyłączone ręcznie, nie zostanie ono ponownie włączone.
¶ Alarm błędu wykrywania spaghetti
¶ Powiązane kody błędów
| Kod błędu | Wyjaśnienie |
|---|---|
| 03008003 | Wady spaghetti zostały wykryte przez AI Print Monitoring. Przed kontynuowaniem drukowania sprawdź jakość wydrukowanego modelu. |
¶ Powiązany błąd HMS
- 0C00_0300_0003_0008: Możliwy błąd spaghetti
¶ Wykrywanie obcych obiektów
Wykrywanie obcych obiektów na platformie laserowej na podstawie kamery na żywo. Steruj ruchem w górę i w dół podgrzewanego stołu, przechwyć dwa obrazy, aby symulować widzenie obuoczne w celu rekonstrukcji sceny, a następnie uzyskaj obszar, w którym znajduje się podgrzewany stół, poprzez segmentację płaszczyzny.
¶ Scenariusz wyzwalania wykrywania obcych obiektów
- Faza wykrywania platformy laserowej przy kalibracji mocowania modułu laserowego. Wykrywanie obcych obiektów przed uruchomieniem modułu laserowego ma na celu przede wszystkim upewnienie się, że w pobliżu platformy bazowej nie ma żadnych obcych obiektów, które mogłyby zakłócić operację bazowania podczas kalibracji mocowania.
- Faza wykrywania platformy tnącej przy kalibracji mocowania modułu tnącego. Podczas procesu poziomowania modułu tnącego konieczne jest oczyszczenie platformy tnącej. Dlatego też, aby mieć pewność, że na platformie tnącej nie ma żadnych obcych obiektów, konieczne jest wykrywanie obiektów obcych.
- Po rozpoczęciu zadania drukowania 3D, należy koniecznie upewnić się, że na płycie roboczej nie ma żadnych obcych obiektów, a zwłaszcza potwierdzić, że wszystkie wcześniej wydrukowane modele zostały usunięte z płyty roboczej przed rozpoczęciem nowego zadania drukowania.
¶ Wskaźniki wydajności wykrywania obiektów obcych
| Kalibracja mocowania modułu laserowego | Kalibracja mocowania modułu tnącego | Drukowanie 3D | |
|---|---|---|---|
| Rozpoznawalny rozmiar obiektu | Obiekty w bliskiej odległości powinny być większe niż 3 cm x 3 cm x 1,5 cm, natomiast obiekty w oddali powinny być większe niż 5 cm x 5 cm x 2 cm. Na poniższym schemacie obszar poza przekątną platformy laserowej (obszar na górze po prawej stronie od kamery) jest zdefiniowany jako „odległy”, natomiast obszar wewnątrz przekątnej jest zdefiniowany jako „bliski”. | Obiekty w bliskiej odległości powinny być większe niż 3 cm x 3 cm x 1 cm, natomiast obiekty w oddali powinny być większe niż 5 cm x 5 cm x 1 cm. | Obiekty w bliskiej odległości powinny być większe niż 3 cm x 3 cm x 1 cm, natomiast obiekty w oddali powinny być większe niż 5 cm x 5 cm x 1 cm. |
| Martwa strefa wykrywania i strefa braku detekcji |
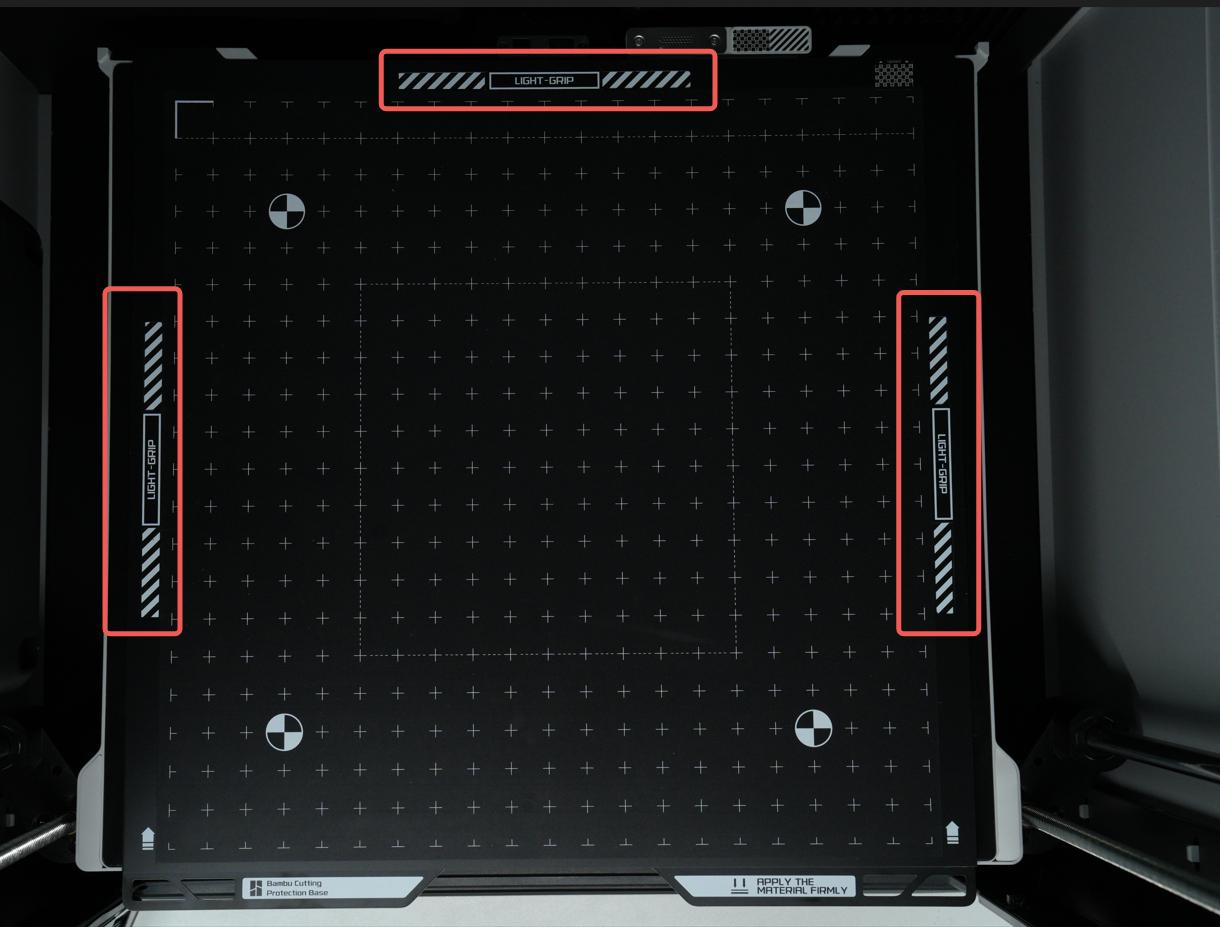
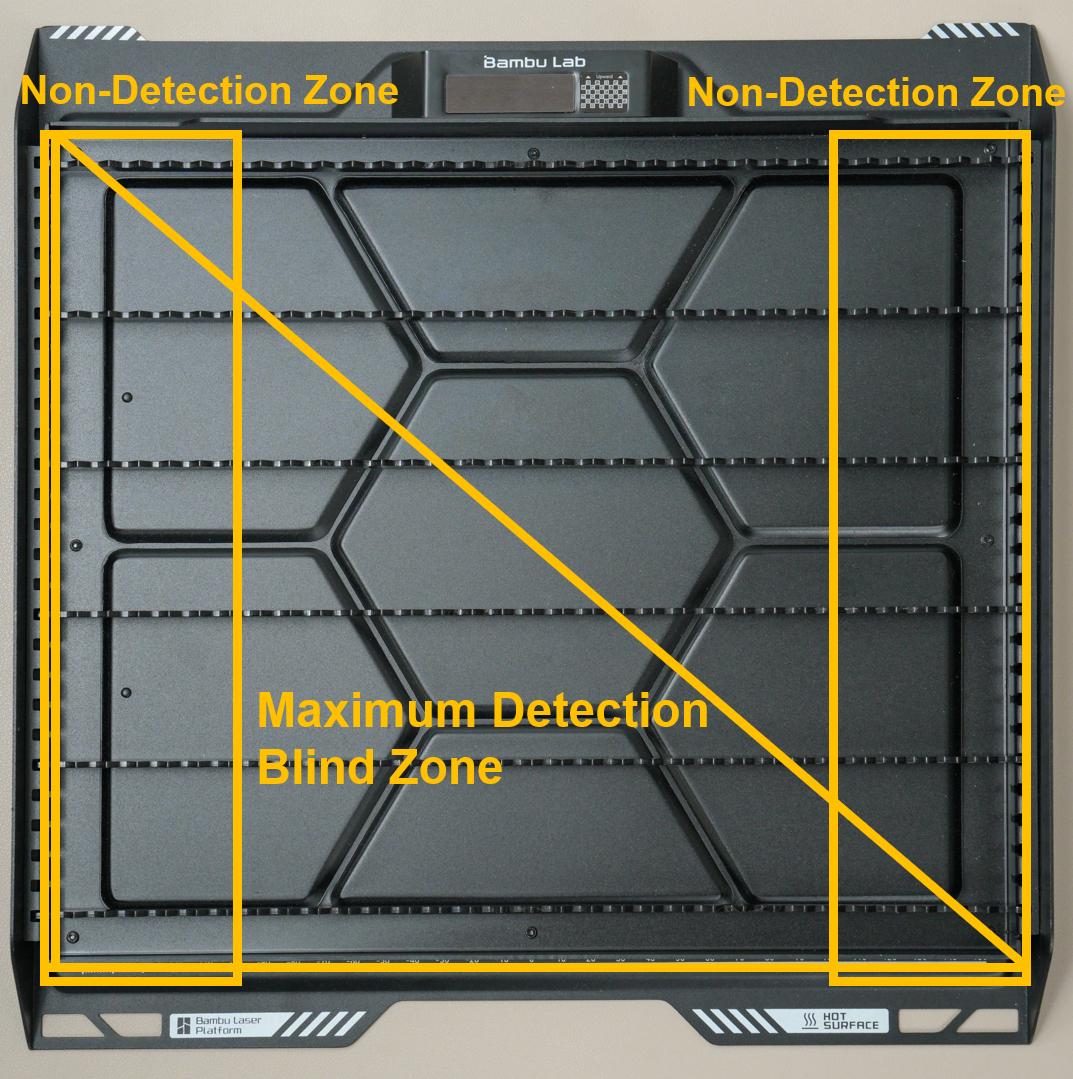 Martwa strefa: Strefa, której kamera na żywo nie może wykryć, przy czym maksymalna martwa strefa detekcji zajmuje połowę stołu (z perspektywy kamery na żywo, obszar o przekątnej 45° w pobliżu kamery będzie zasłonięty). Gdy stół jest ustawiony nisko, znaczna jego część będzie zasłonięta, co prowadzi do martwej strefy. 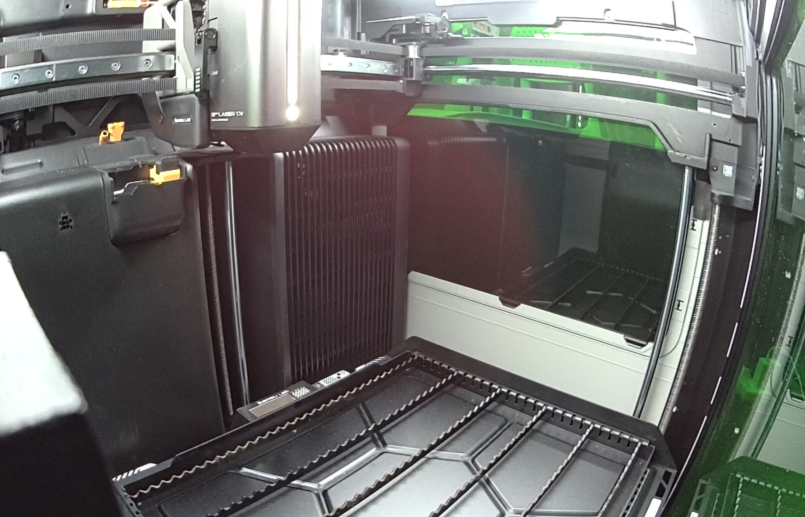 Strefa braku detekcji: Po lewej i prawej stronie znajdują się strefy braku detekcji o szerokości około 6 cm, w których nie są wykrywane żadne obce obiekty w tych strefach. Celem ustawienia stref braku detekcji jest wyeliminowanie zakłóceń z kołków platformy. |
Martwa strefa jest taka sama jak w przypadku modułu laserowego, bez stref braku detekcji poza martwymi strefami. 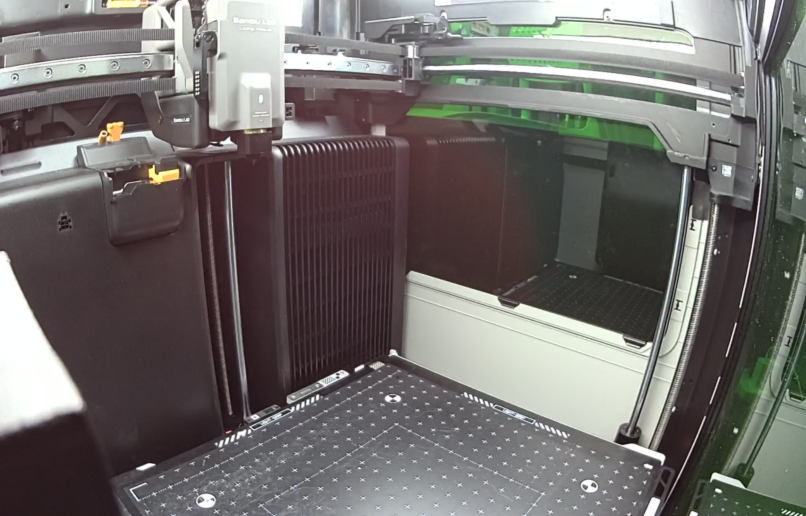 |
Maksymalna martwa strefa to trójkątna strefa o wymiarach 6 cm x 6 cm w pobliżu kamery na żywo. Poza martwą strefą nie ma stref braku detekcji. 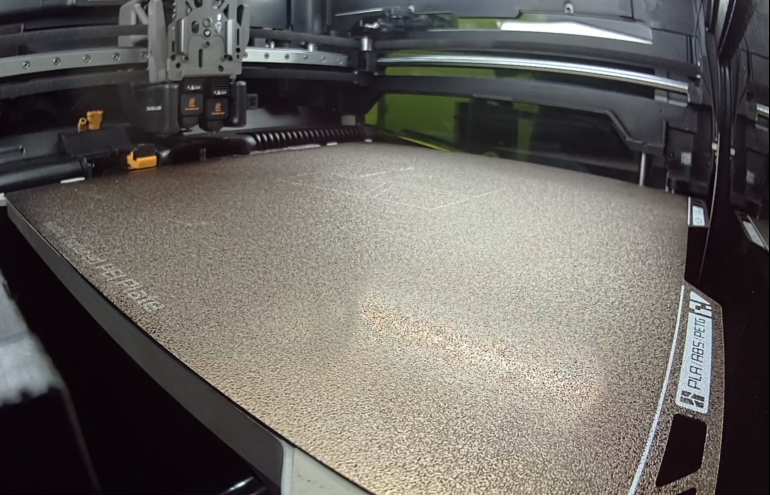 |
| Liczba wykryć | 1 | 1 | Do 2 razy. Wykonaj wykrywanie obiektów bez wcześniejszego podnoszenia podgrzewanego stołu (aby zapobiec pozostawieniu odcisków na stole). Po potwierdzeniu, że nie ma żadnych obcych obiektów, podnieś podgrzewany stół w celu przeprowadzenia drugiego wykrywania. |
| Sytuacje, które mogą potencjalnie prowadzić do niepowodzenia wykrywania | Duże płaskie obiekty (obiekty, których powierzchnie prawie całkowicie pokrywają stół, co może prowadzić do potencjalnych pominiętych wykryć) | Duże płaskie obiekty (obiekty, których powierzchnie prawie całkowicie pokrywają stół, co może prowadzić do potencjalnych pominiętych wykryć) |
1. Duże płaskie obiekty (obiekty, których powierzchnie prawie całkowicie pokrywają stół, co może prowadzić do potencjalnych pominiętych wykryć) 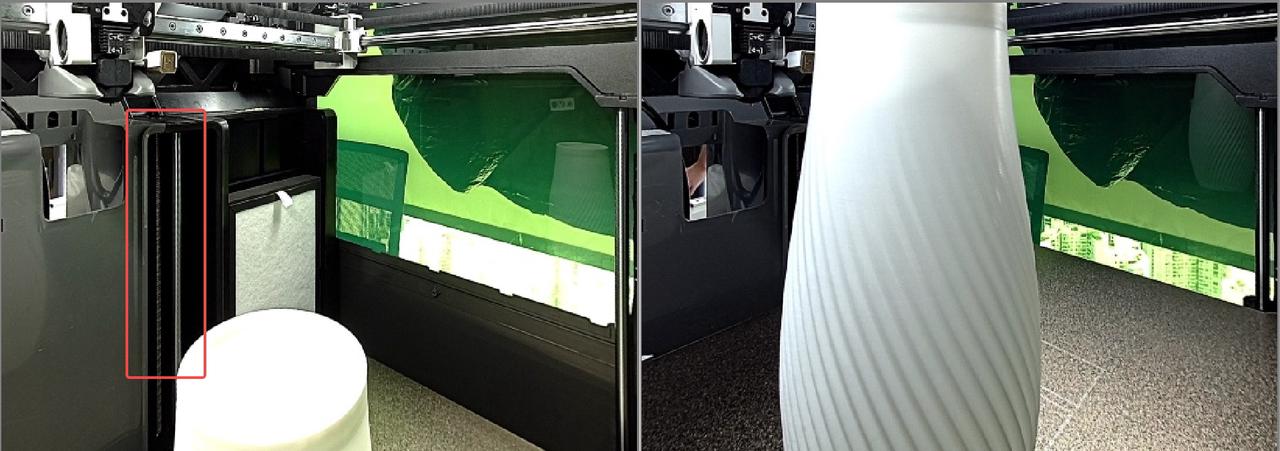 |
¶ Alarm błędu wykrywania obiektów obcych
¶ Powiązane kody błędów
| Kod błędu | Wyjaśnienie | Rozwiązanie problemu |
|---|---|---|
| 03008046 | Przekroczono limit czasu wykrywania obiektów obcych, uruchom ponownie drukarkę. | Uruchom ponownie drukarkę |
| 0500807A | Wykrywanie obiektów obcych nie przyniosło efektu. Możesz kontynuować zadanie lub wyświetlić asystenta. | Zajrzyj do asystenta, aby wyświetlić określone powiadomienia HMS |
| 0500806E | Obce obiekty wykryto na stole grzewczym; sprawdź i wyczyść stół grzewczy. | Po usunięciu obiektów obcych kliknij „Continue”. |
¶ Powiązane kody błędów
- 0C00_0100_0001_000F: Kalibracja kamery Live View nie powiodła się. Uruchom ponownie urządzenie lub zaktualizuj oprogramowanie sprzętowe.
- 0C00_0100_0001_0010: Kalibracja kamery Live View nie powiodła się. Sprawdź, czy podgrzewany stół jest czysty i upewnij się, że obraz z kamery jest czysty i bez zabrudzeń. Po wykonaniu tych czynności przeprowadź ponowną kalibrację.
- 0C00_0100_0001_0011: Kalibracja kamery Live View nie powiodła się, przeprowadź ponowną kalibrację. Upewnij się, że płyta montażowa jest pusta, a widok z kamery jest czysty i prawidłowo zorientowany. W przypadku powtarzających się błędów skontaktuj się z działem obsługi klienta.
- 0C00_0100_0001_0012: Kalibracja kamery Live View nie powiodła się i nie można zapisać wyniku kalibracji. Spróbuj przeprowadzić ponowną kalibrację. Jeśli kalibracja wielokrotnie się nie powiedzie, skontaktuj się z działem obsługi klienta.
- 0C00_0100_0001_0013: Kalibracja kamery Live View nie powiodła się i nie można odczytać numeru seryjnego kamery Liveview. Skontaktuj się z działem obsługi klienta.
- 0C00_0300_0002_0012: Wykrywanie obcych obiektów nie działa. Kamera Live View wymaga kalibracji. Proszę wejść w "Settings > Calibration" na ekranie drukarki. Jeśli zainstalowany jest moduł laserowy lub tnący, proszę go usunąć przed kalibracją.
- 0C00_0300_0002_0013: Wykrywanie obcych obiektów nie działa. Uruchom ponownie urządzenia lub zaktualizuj oprogramowanie układowe.
- 0C00_0300_0002_0014: Zaleca się skalibrowanie kamery Live View w celu zwiększenia dokładności wykrywania obcych obiektów. Wybierz "Settings > Calibration" na ekranie drukarki. Jeśli zainstalowany jest moduł laserowy lub tnący, usuń go przed kalibracją.
- 0C00_0300_0002_0015: Wykrywanie obcych obiektów nie działa. Wykryto, że kamera Live View została wymieniona. Jeśli zainstalowany jest moduł laserowy lub tnący, odinstaluj moduł, kliknij "Settings>Calibration" na ekranie drukarki i ponownie skalibruj kamerę Live View.
- 0C00_0300_0002_0016: Wykrywanie obcych obiektów nie działa i nie można odczytać numeru seryjnego kamery Live View. Skontaktuj się z zespołem obsługi klienta.
¶ Sytuacja wymagająca kalibracji kamery na żywo w celu wykrywania obcych obiektów
Po wymianie lub ponownej instalacji kamery na żywo, zazwyczaj konieczne jest skalibrowanie kamery na żywo przed przeprowadzeniem wykrywania obcych obiektów.
- Kalibracja jest wykonywana przed opuszczeniem fabryki przez maszynę, a kalibracja kamery zazwyczaj nie jest wymagana podczas normalnego użytkowania.
- Jeśli kamera na żywo zostanie wymieniona, system wykryje zmiany numeru seryjnego podczas uruchamiania maszyny lub przed uruchomieniem wykrywania obcych obiektów i wyświetli monit o kalibrację.
- Jeśli kamera na żywo zostanie ponownie zainstalowana (bez zmian numeru seryjnego), zaleca się również ponowną kalibrację raz, a podczas procesu wykrywania obcych obiektów określi również, czy ponowna kalibracja jest konieczna. Jednak wykrywanie obcych obiektów ma wysoką tolerancję dla kamery na żywo, a jeśli odchylenie kąta nie przekracza ±3 stopni, nie zostanie wyświetlony monit o kalibrację.
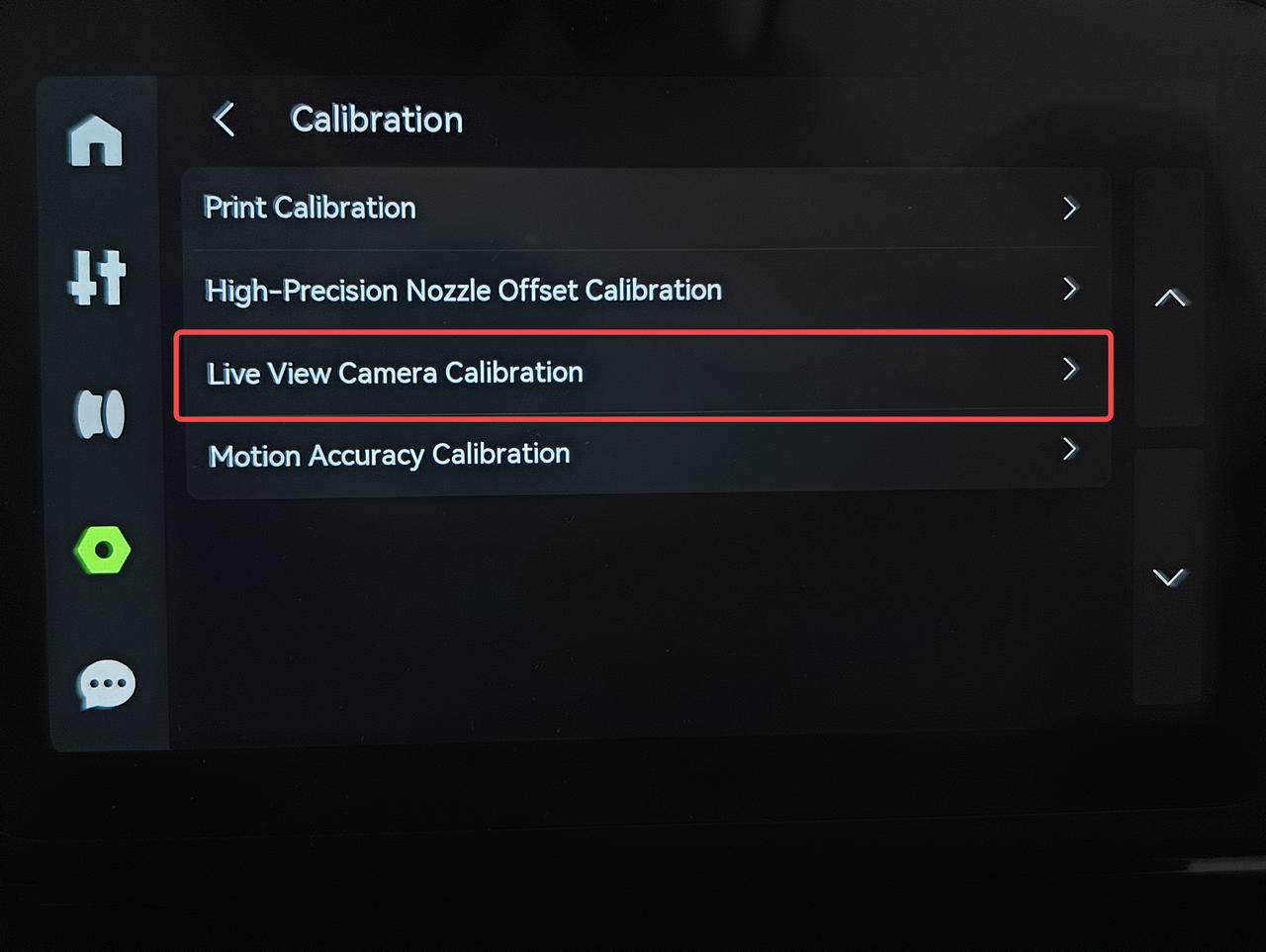
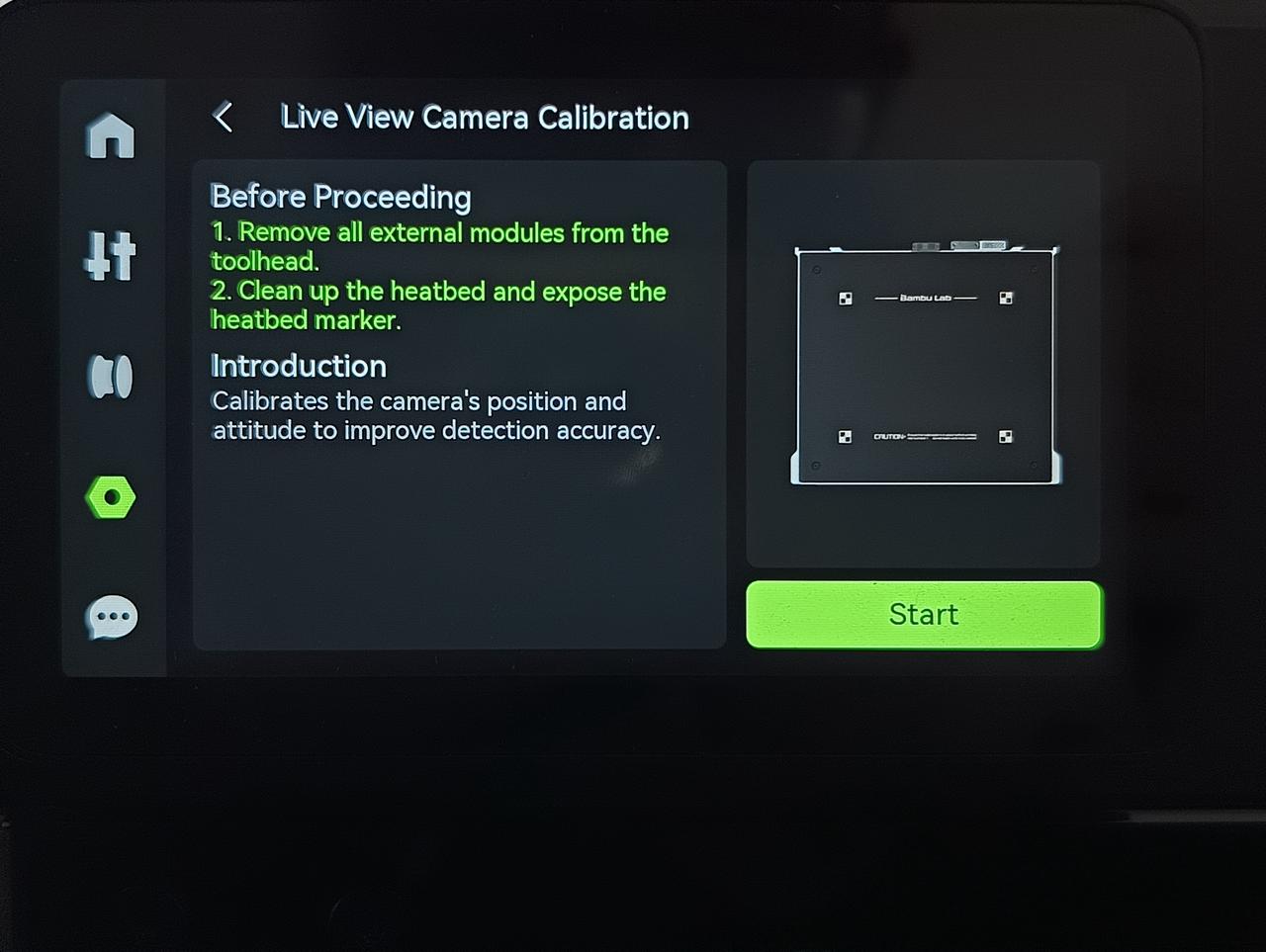
- Aby skalibrować, należy usunąć laser lub moduł tnący zainstalowany na głowicy, a następnie przeprowadzić kalibrację kamery na żywo w Settings -> Calibration, aby zakończyć proces kalibracji.
 |
 |
¶ Akcje podczas wykrywania obiektów obcych
- Wykrywanie obiektów obcych na początku drukowania 3D: Wykrywanie obiektów obcych jest przeprowadzane do dwóch razy w celu zmniejszenia martwych stref. Gdy początkowa wysokość stołu grzewczego jest większa niż 135, zostaną wykonane dwa wykrycia. Pierwsze wykrycie następuje, gdy stół grzewczy znajduje się w swojej początkowej pozycji. Podczas drugiego wykrycia stół grzewczy zostanie podniesiony, a wysokość stołu podczas wykrywania będzie wynosić od 70 do 90.
- Wykrywanie obiektów obcych przed rozpoczęciem przetwarzania 2D: Jeśli stół grzewczy jest zbyt wysoki, zostanie obniżony w celu wykrycia. Jeśli stół grzewczy jest zbyt niski, zostanie podniesiony w celu wykrycia, a wysokość stołu podczas wykrywania będzie wynosić od 70 do 240.
¶ Wykrywanie płyty roboczej
Wykrywanie na miejscu i typu płyty roboczej na podstawie kamery na żywo. Jeśli używana płyta robocza nie pasuje do tej określonej w pliku podziału, natychmiast zatrzymaj drukowanie, aby zapobiec awariom drukowania.
¶ Scenariusze wyzwalania wykrywania płyty roboczej
Po zainicjowaniu każdego zadania drukowania plik wydruku jest wysyłany do drukarki, a drukarka sprawdza typ płyty roboczej i informacje o położeniu na bieżącym stole roboczym zgodnie z typem płyty w pliku podziału.
¶ Akcje wykrywania
Wykrywanie płyty roboczej następuje po powrocie stołu roboczego do pozycji początkowej. Następnie stół roboczy przesunie się na ustaloną wysokość Z, wykorzystując kamerę na żywo do przechwycenia obrazu w celu wykrycia.

¶ Przycisk wykrywania
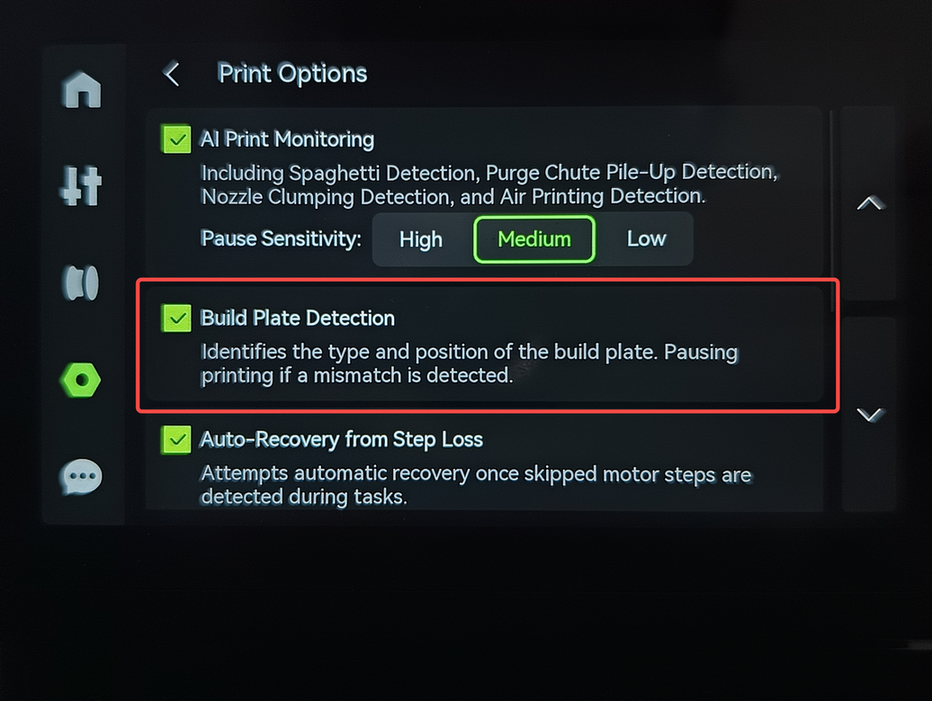
Włączenie tej funkcji oznacza, że po zainicjowaniu zadania drukowania zostanie wykryte, czy płyta robocza pasuje do typu płyty roboczej w pliku przekroju; wyłączenie tej funkcji oznacza, że płyta robocza nie zostanie wykryta po zainicjowaniu zadania drukowania.
¶ Alarm błędu wykrywania płyty roboczej
¶ Powiązane kody błędów
0C00_0300_0002_000C: Znacznik lokalizacji płyty roboczej nie został wykryty. Sprawdź, czy płyta robocza jest prawidłowo wyrównana.
¶ Wykrywanie typu głowicy
Na podstawie obrazu z kamery na żywo wykonaj wykrywanie na miejscu i typu hotendu bieżącej głowicy, aby zapobiec niepowodzeniu drukowania spowodowanemu niezgodnością między rzeczywistym typem głowicy roboczej a plikiem przekroju.
¶ Scenariusze wyzwalania wykrywania typu głowicy roboczej
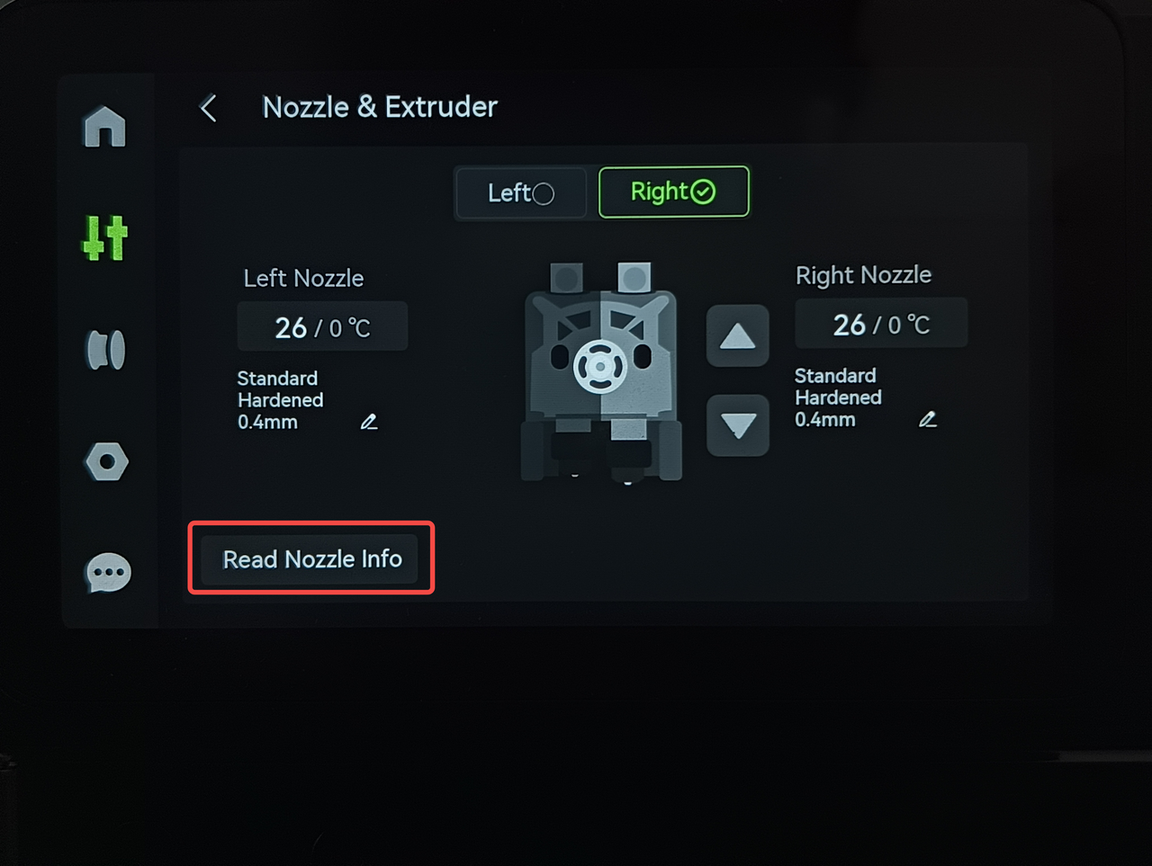
- Interfejs użytkownika ekranu wyzwala wykrywanie. Kliknij "Read Nozzle Info" na ekranie
- Po zainicjowaniu każdego zadania drukowania plik wydruku jest wysyłany do drukarki, a drukarka sprawdza typ hotendu na bieżącej głowicy narzędzia na podstawie typu hotendu w pliku podziału.
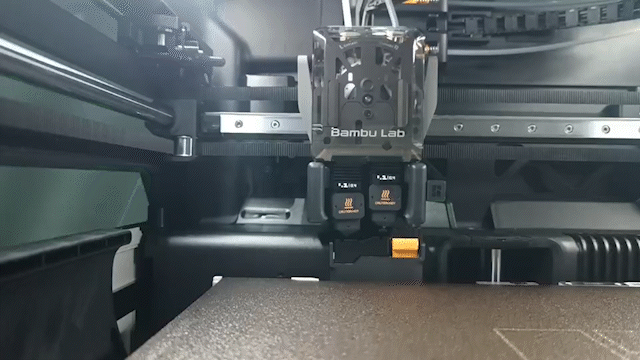
¶ Akcje wykrywania
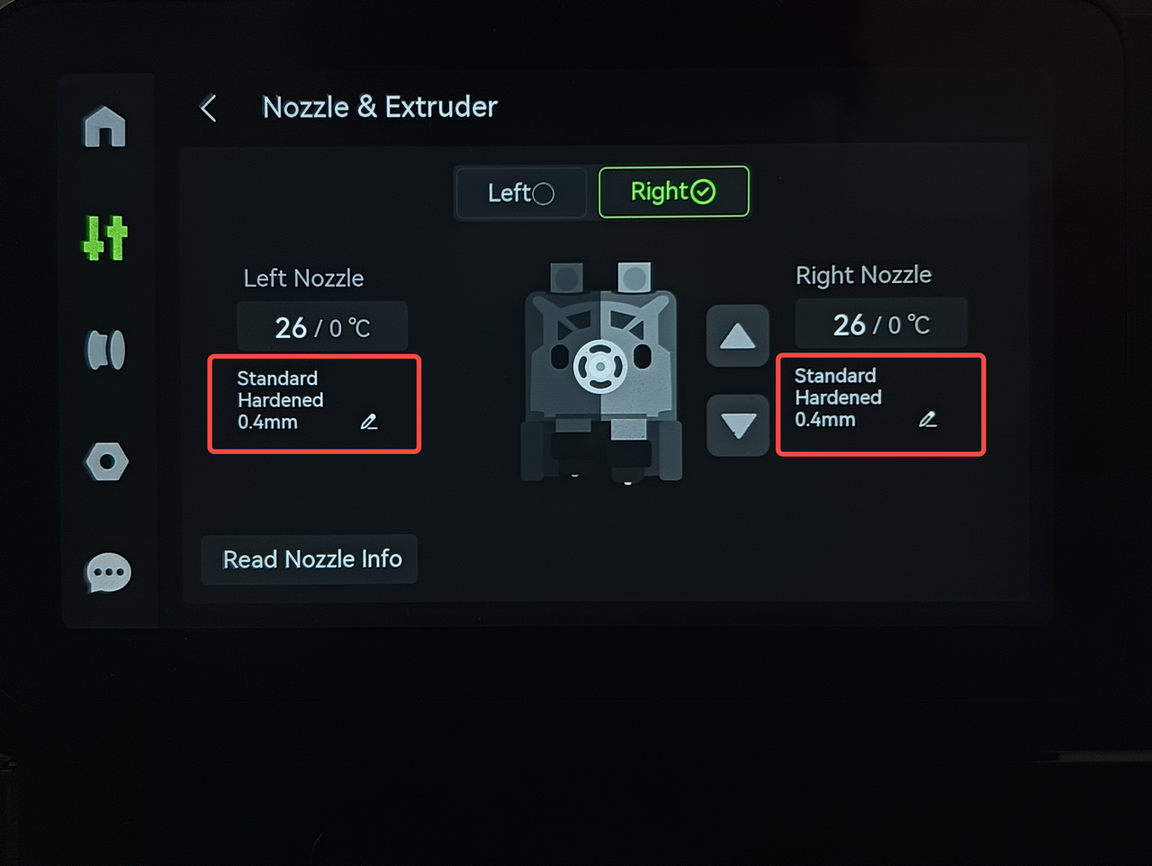
Po uruchomieniu wykrywania głowica przesuwa się w pobliżu kamery na żywo i robi zdjęcie hotendu. Następnie wykrywa typ hotendu i wyświetla informacje o dyszy na ekranie.
 |
 |
¶ Wyświetlanie informacji po wykryciu
¶ Alarm błędu dla wykrycia typu hotendu
¶ Powiązane kody błędów
| Kod błędu | Wyjaśnienie |
|---|---|
| 05004052 | Wykryto błąd na hotendzie. |
| 05008053 | Dysza nie jest dopasowana do pliku podziału. Zainicjuj drukowanie po ponownym pocięciu lub kontynuuj drukowanie po wymianie prawidłowej dyszy. Uwaga: temperatura hotendu jest wysoka. |
¶ Wykrywanie dźwigni szybkiego zwalniania modułu laserowego i tnącego
Podczas korzystania z modułów laserowych i tnących, podczas kalibracji mocowania i inicjowania etapów przetwarzania, kamera na żywo zidentyfikuje, czy dźwignie szybkiego zwalniania modułów laserowych i tnących są bezpiecznie zablokowane. Jeśli nie są zablokowane, zostanie zgłoszony błąd, a drukowanie zostanie wstrzymane.


¶ Powiązany błąd HMS
- 0300_9500_0001_0006: Moduł laserowy nie został wykryty: moduł mógł spaść lub dźwignia szybkiego zwalniania może nie być zablokowana.
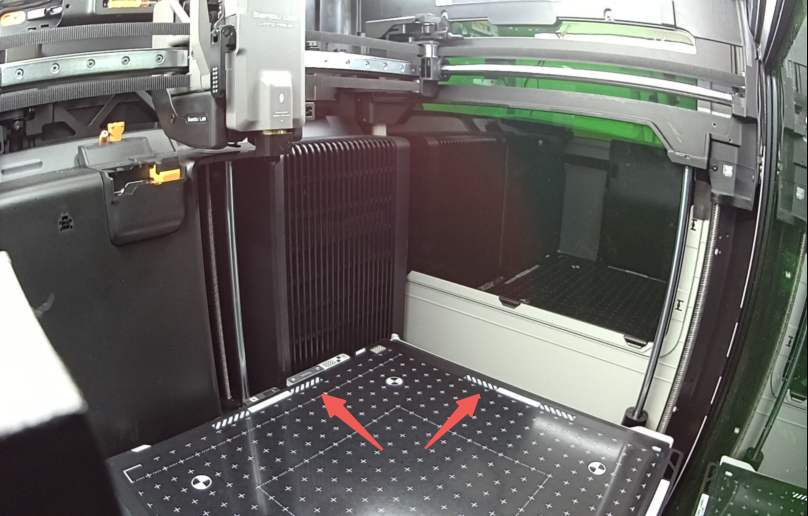
¶ Wykrywanie położenia platformy tnącej
Kamera na żywo może również potwierdzić, czy platforma tnąca jest umieszczona na stole grzewczym, rozpoznając znaczniki na platformie tnącej. Na platformie tnącej znajdują się łącznie trzy znaczniki, a kamera może wykrywać znaczniki w różnych pozycjach, gdy stół grzewczy znajduje się na różnych wysokościach.
Czas wykrywania: Podczas kalibracji mocowania, po otwarciu lub zamknięciu przednich drzwi maszyny, podczas robienia zdjęć i inicjowania produkcji w Bambu Suite.
¶ Inteligentne wykrywanie kamery Birdseye

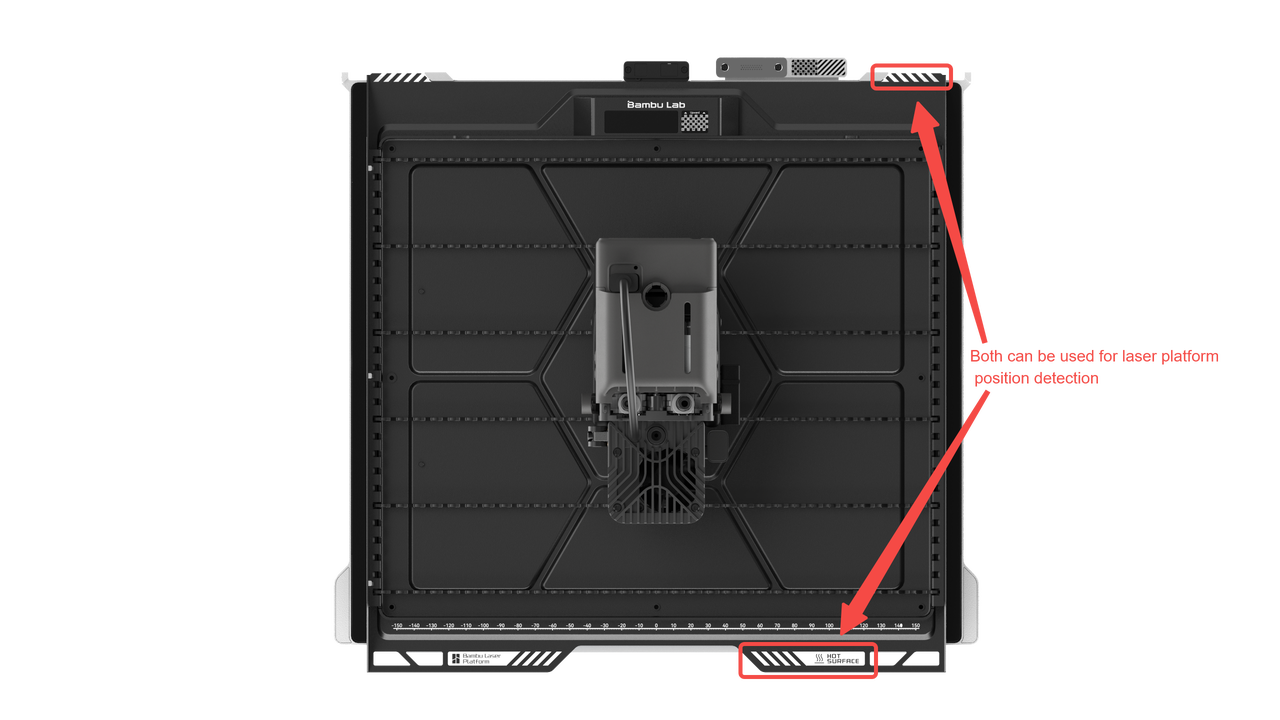
¶ Wykrywanie położenia platformy laserowej
Podnosząc lub opuszczając podgrzewany stół do określonej wysokości, kamera Birdseye identyfikuje znaczniki na platformie laserowej, aby określić, czy platforma laserowa została umieszczona.
Czas wykrywania: Podczas kalibracji mocowania, po otwarciu lub zamknięciu przednich drzwi maszyny, podczas robienia zdjęć i inicjowania produkcji w Bambu Suite.
¶ Powiązane kody błędów
| Kod błędu | Wyjaśnienie |
|---|---|
| 05008063 | Platforma nie została wykryta podczas kalibracji; upewnij się, że platforma laserowa jest prawidłowo umieszczona. |
| 05008055 | Moduł laserowy jest zainstalowany, ale wykryto platformę tnącą. Umieść platformę laserową i wykonaj kalibrację lasera. |
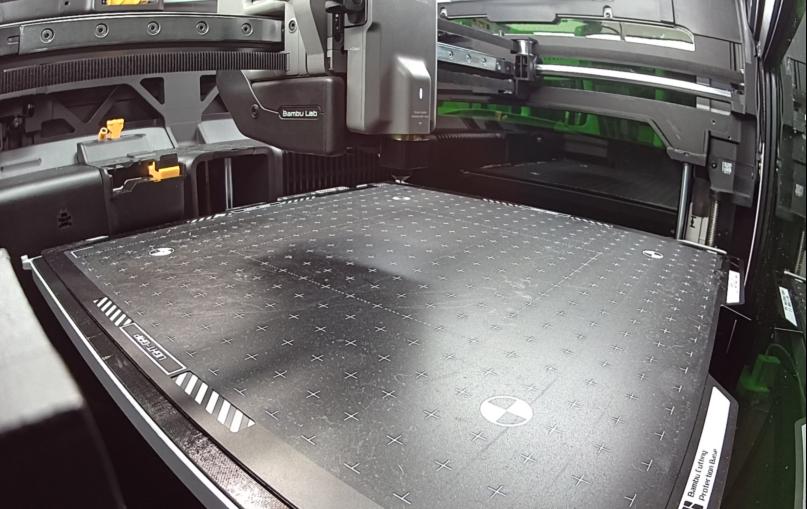
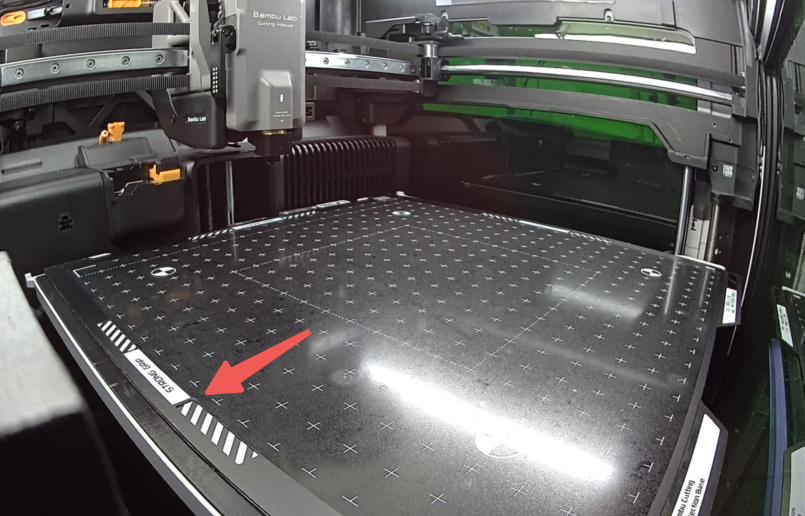
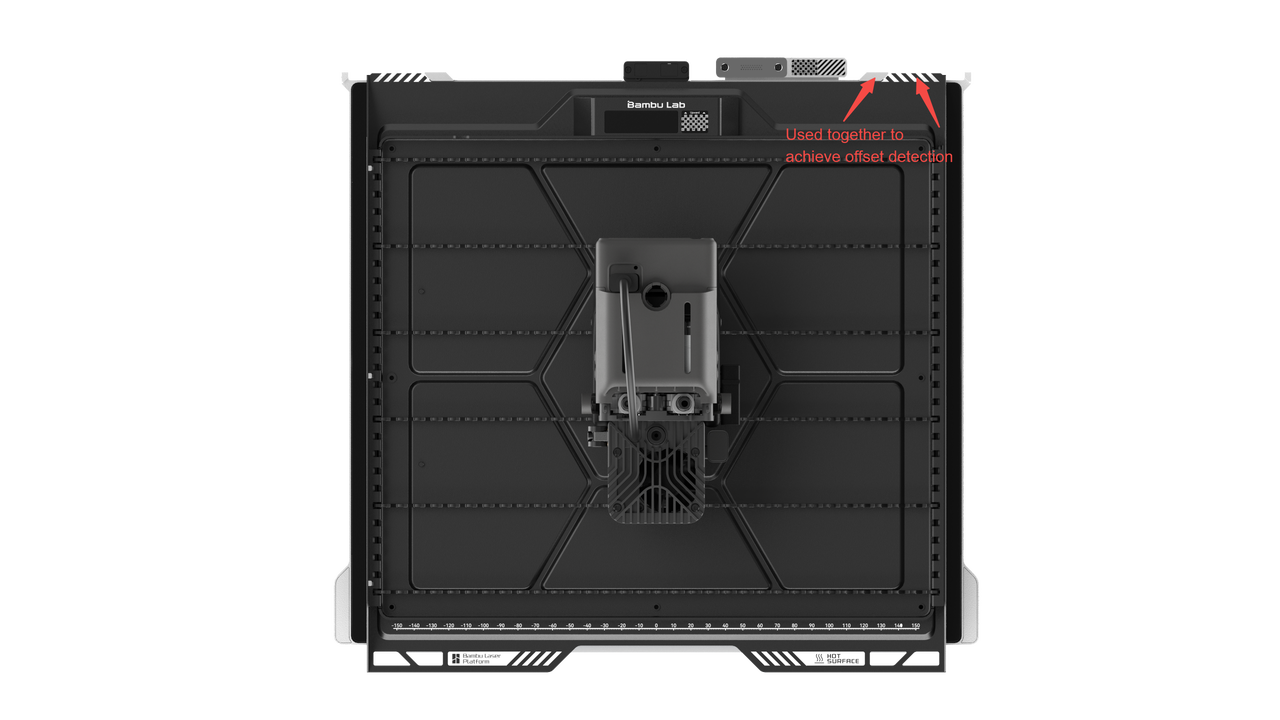
¶ Wykrywanie przesunięcia platformy laserowej
Kamera Birdseye może również wykryć, czy platforma laserowa jest przesunięta na podstawie znaczników i bloku granicznego wewnątrz podgrzewanego stołu.
Czas wykrywania: Podczas kalibracji mocowania, po otwarciu lub zamknięciu przednich drzwi maszyny, podczas robienia zdjęć i inicjowania produkcji w Bambu Suite.
¶ Powiązany kod błędu
| Kod błędu | Wyjaśnienie |
|---|---|
| 05008074 | Platforma laserowa jest przesunięta. Upewnij się, że cztery rogi platformy są wyrównane z podgrzewanym stołem, a znacznik nie jest zasłonięty. |
Polskie tłumaczenie Bambu Lab wiki jest dostarczane przez get3D.pl za wiedzą i zgodą Bambu Lab i jest oparte na oryginalnej stronie Bambu Lab Wiki. Dokładamy wszelkich starań aby zapewnić aktualność zawartych tutaj informacji, jeśli jednak będziesz miał jakiekolwiek wątpliwości, sprawdź oryginalną stronę.